


Описание
Последняя версия f3_evo_matched щетка управления полетомПоддержка 6-квадрокоптера с дистанционным управлением, Рабочий ток каждого вала может быть до 10 А или выше, Улучшенный модуль усилителя кровяного давления, может достигать 500 мА · ч совпадающий ток, используя UART1 или UART2 выход 5 В, может соответствовать диаграмме низкой мощности как 25 МВт FPV камера, поддержка функции LED_STRIP.
Внимание:
1, пропеллер должен быть удален до выполнения программы управления полетом кисти или калибровки;
2, Управление полетом по умолчанию кисти F3 EVO 1.13.0 программы, если вы хотите повторно чистить прошивку, пожалуйста, напишите "set motor_pwm_rate = 1000" в командной линии управления CLI программного обеспечения конфигурации CF, и введите команду «сохранить», чтобы сохранить!
3. Установить дроссель установить максимальное значение 2000, может эффективно увеличить время полета.
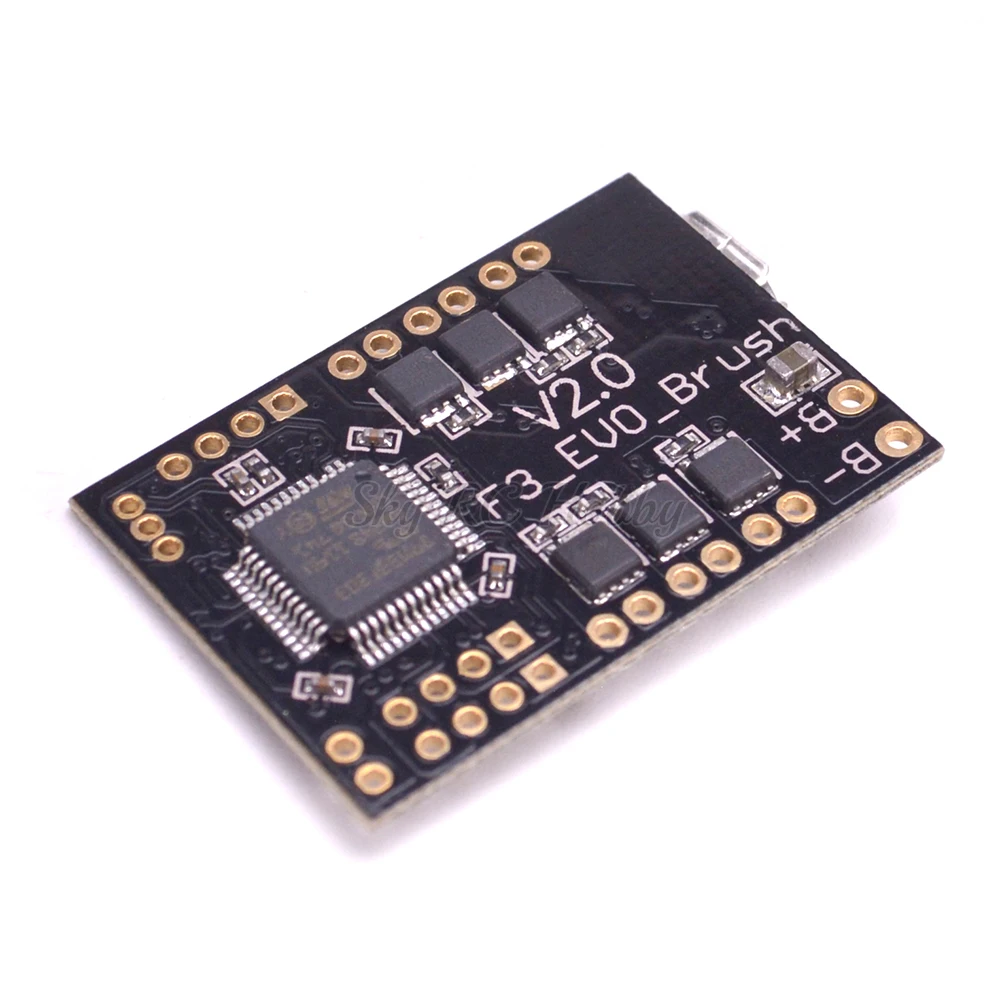
F3 EVO V2.0 матовый контроль полета:
Характеристики:
Размер: 22*32,5 мм
Толщина: 1,2 мм
Вес: 3 г
Особенности:
1, версия f3_evo_brass не входит в F3 EVO SP RACING, основанная на SP RACING F3 EVO firmware 32 Brass flight control;
2, улучшить схему подачи питания, так что управление полетом поддерживает 1 S (4,2 в) и 2 S (8,4 в) блок питания, 2 S мощность может приносить более сильный опыт полета. Индивидуально спроектированная конфигурация цепи, поставляется с технологией Buck booster, или оба источника питания 1 S 2 S, выход UART1/2/3 5 V, выход DSM 3,3 V;
3, используя STM32F303CCT6 + MPU6500, усовершенствованная Аппаратная платформа F3 гарантирует более стабильный полет;
4, с большим током NMOS транзисторов, рабочий ток до 10А на канал или более. Каждый мотор и оснащен диодом свободного хода;
5, Поддержка для приёмника PPM, SBUS, приемник на DSM входного сигнала;
6, с детектором напряжения батареи и интерфейсом зуммера;
7, поддержка современного мира почти все безсердечные двигатели, включая 1020 и другие behemoths полые чашки.
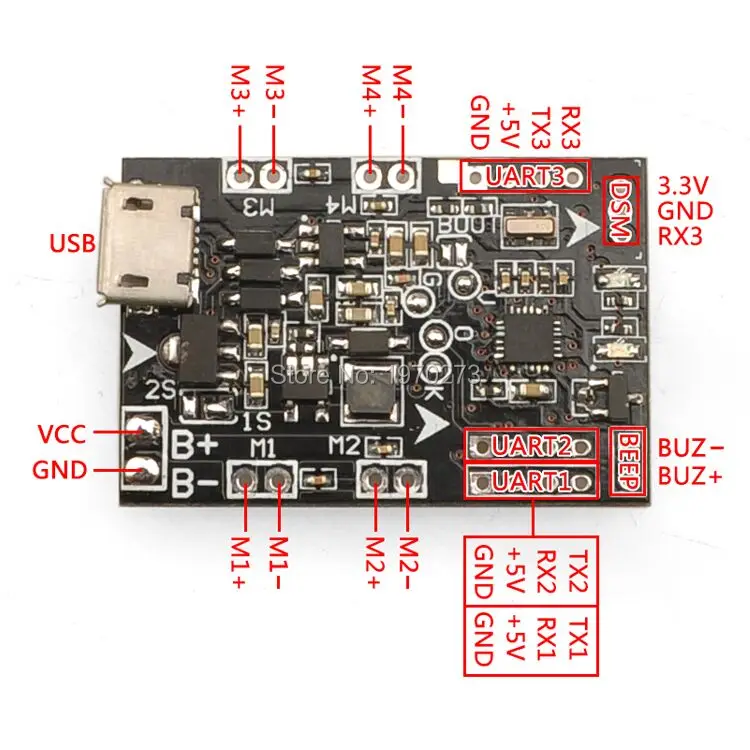
Приемник конфигурации:
1. DSM приемник на DSM Может припаять непосредственно к интерфейсу 3,3 V, GND, RX3, CF конфигурации программного обеспечения UART3.
2. PPM и SBUS приемник может сварить к UART2 GND, + 5 В, RX2 выше, SBUS сигнал CF в конфигурации программного обеспечения.
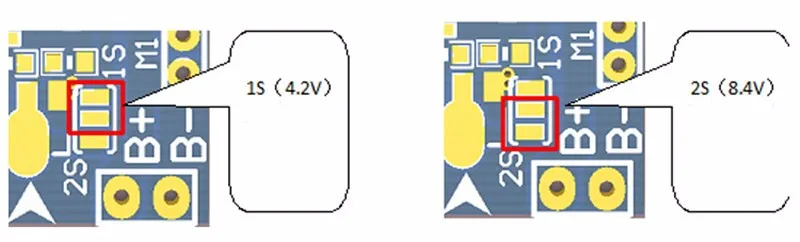
Перед подачей питания обратите внимание на выбор напряжения аккумулятора:
Доставка по умолчанию составляет 1 с (4,2 в); 2 с сначала нужно отсоединить короткие контакты 1 S, 2 S, а затем подключить две колодки короткий. Не допускайте трех одинаковых подушечек, коротких вместе.




Советы:
У кого-нибудь еще была проблема моторов, которые автоматически крутятся при подключении к батарее?
Только плата cleanflight подключена к одному мотору в настоящее время, который автоматически вращается. Я отключил все, но те два, чтобы сузить его, чтобы понять, что чистая плата полета вызывает его, а не приемник, который отключен.
Я могу подключить его к очистке полета и изменить настройки, но не могу понять, почему моторы автоматически вращаются при подключении аккумулятора.
Мысли?
** Обновление-
Я нашли видео на youtube и сделал это, чтобы исправить свою проблему.
Если вы начинаете полную мощность при подключении к батарее, вы должны установить motor_pwm_rate до 1000.
Перейдите к CLI и введите:
Тип: комплект motor_pwm_rate = 1000
Нажмите «Ввод
Тип: Сохраните
Нажмите «Ввод
Характеристики
- Предназначение
- Транспортные средства и Игрушки Дистанционного уПлита
- Материал
- Комбинированный материал
- Детали дистанционного управления и комплектующие
- Соединители / обмотка
- Детали для тюнинга и запчасти
- Рама
- Периферийные устройства для дистанционного управления
- Аккумулятор
- Характеристики
- Аккумулятор
- Расходный материал для инструментов
- Склеивание
- Тип транспорта
- Самолеты
- Номер модели
- F3 EVO FC Board
- Технические характеристики
- Значение 5
- Бренд
- Readytosky
Сопутствующие товары





