



Описание
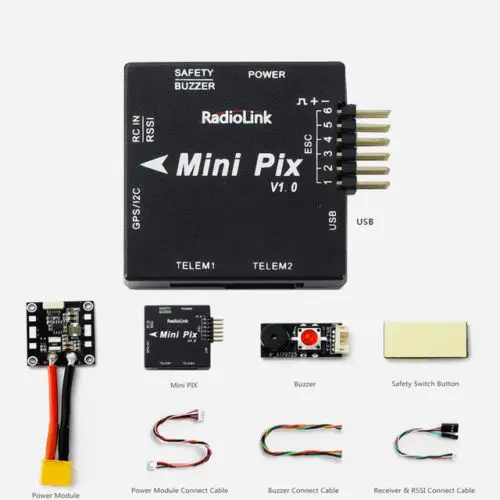
Radiolink Mini PIX управление полетом Базовая конфигурация без gps модель Attitude Hold для Pixhawk DIY RC Racer Дрон Квадрокоптер
Примечание: Не совместим с другими брендами gps.
Для пользователей, которые впервые используют mini PIX, мы предлагаем использовать его, выполните следующие действия:
1. Вы должны установить планировщик миссии и драйвер здесь и ознакомиться с меню.
Скачать последний планировщик миссии здесь: http://radiolink.com.cn/doce/product-detail-
133. html
Скачайте здесь форму драйвера: https://www.microsoft.com/net/download/dotnet-framework-
Время работы/net462
2. Чтобы установить соединение, необходимо сначала выбрать способ связи/канал, который вы хотите
Используйте, а затем Настройте физическое оборудование и драйверы устройств Windows. Вы можете подключить ПК и
Автопилот с помощью usb-кабелей, телеметрических радиоприемников, Bluetooth, ip-подключений и т. Д.
3. Загрузите обновление прошивки по usb-кабелю, если вам нужно.
4. Подключите планировщик Миссии к автопилоту, а затем подключите приемник к автопилоту, чтобы закончить
Калибровка передатчика, акселерометра и компаса.
5. Настройка режима полета передатчика RC.
6. Собрать самолет и завершить предполетный контрольный список.
7. Использование PID.
8. Расширенная конфигурация.
|


Характеристики
- Бренд
- RadioLink
- Материал
- Комбинированный материал
- Номер модели
- Mini PIX
- Тип транспорта
- Вертолеты
- Расходный материал для инструментов
- Тип сборки
- Периферийные устройства для дистанционного управления
- Other
- Детали для тюнинга и запчасти
- Other
- Характеристики
- Сборка
- Детали дистанционного управления и комплектующие
- Радиосистемы
Сопутствующие товары




