



Описание
Raspberry Pi 4B/3B + беспилотный Интеллектуальный робот TurboPi автомобиль визуального слежения OpenCV/AI глубокого обучения питона

Raspberry Pi AI разведки
Автономный автомобиль TurboPi
Глубокого обучения, система автоматического управления полётом
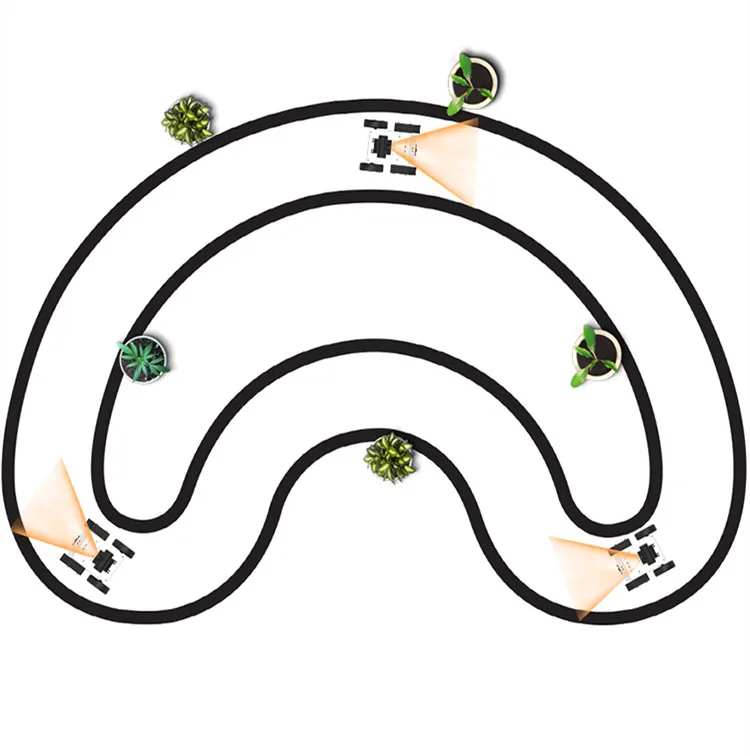
Автоматический визуальный линия технического осмотра
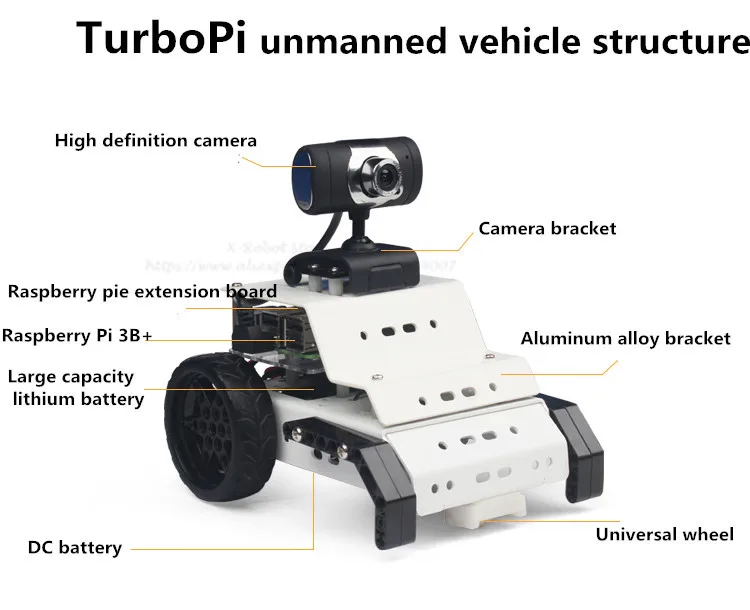
Введение в беспилотные транспортные средства TurboPi
Беспилотный автомобиль TurboPi-автомобиль без водителя с открытым исходным кодом
Система машинного обучения на основе Google с открытым исходным кодом
TensorFlow работает с кроссплатформенной компьютерной версией библиотеки PenCN
Имитирующий сейчас горячий Дрон
Он основан на системе управления Raspberry Pi 3B +
Язык программирования Python
Оснащен камерой высокой четкости
Нет необходимости для датчиков
Автопилот глубокого обучения и автоматический визуальный осмотр
 ПоддержкаАвтоматическое переключение
ПоддержкаАвтоматическое переключениеВ зависимости от относительного положения линейной площади выборки
Идентифицировать кривая кривизны
Тем самым интеллектуальная регулировка скорости автомобиля
Чем больше кривизна, тем больше разница
Чем гибче поворот
Гарантия гоночный потребности
Также поддерживает Ручное переключение
2 выбора режимов вождения
ИИ глубина обучения автопилот и автоматическая визуальная инспекционная линия
AI глубина обучения, система автоматического управления полётом
TurboPi беспилотный автомобиль на основе Google источник развития обучения framework TensorFlow
Мы оптимизировали соответствующие алгоритмы
Вы можете использовать ручку для управления автомобилем для глубокого обучения.
После обучения автомобиль может осуществить функцию автоматического вождения.
Как глубоко узнать автоматическое Вождение робота
1: сбор данных ---- камера
После вождения автомобиля, вы можете управлять автомобилем через ручку, чтобы следить за планируемым маршрутом.
Автомобиль собирает данные изображения через камеру во время вождения.
Вам нужно дать машине работать достаточное количество поворотов (чем больше количество поворотов, тем лучше эффект)
Убедитесь, что автомобиль собирает достаточно фотографий

Обработка данных TensorFlow
После завершения сбора данных вы можете использовать Raspberry Pi или компьютер.
Обрабатывать каждый из соответствующих данных манипуляций, которые были сделаны сразу после тренировки

Особенности обучения и производственная модель вождения
В процессе обучения, коническая нейронная сеть используется для извлечения картографической связи между изображением, сделанным тележкой и рулевым управлением. Эта связь сохраняется в модели для создания модели вождения.

Автоматический визуальный линия технического осмотра
Когда камера обнаруживает линию на изображении, она автоматически отслеживает и корректирует направление в соответствии с алгоритмом.

TurboPi сценарий приложения
Учебное оборудование для колледжа искусственного интеллекта
Гоночная Игра выделенная умная машина

Несколько методов управления
Поддержка телефона и ручка управления
Вы можете увидеть картинку в реальном времени, сделанную автомобилем, визуально синхронизируя с Беспилотным автомобилем TurboPi через мобильное приложение и ПК.

TurboPi беспилотный требования к транспортным средствам
Параметры кузова
Размер: 165,7*159,2*141,9 мм
Вес: 0,55 кг
Материал корпуса: смесь металла и пластика
Разрешение камеры: 480 P
Двигатель: коэффициент уменьшения 1:48 Вход: 3-6 в выход: 110 об/мин
Система питания
Мощность: 7,4 V 20 V 2200 mAh литиевая батарея
Управление Системы
Метод управления: Android phone APP управление/ручка
Аппаратная часть: материнская плата Raspberry Pi 3B + и плата расширения Raspberry Pi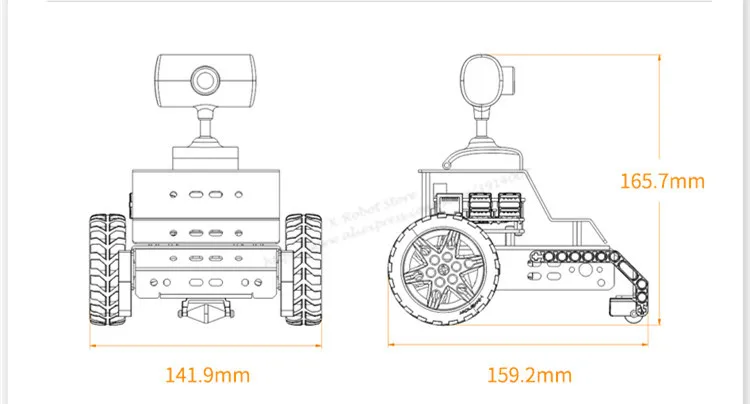
TurboPi беспилотного транспортного средства (Готовый продукт/поперечная балка)
Робот полный кронштейн * 1 комплект
PS2 ручка * 1
Raspberry Pi 3B + (опционально) * 1
Плата расширения Raspberry Pi * 1
Ручка приемник * 1
Охлаждающий вентилятор * 1
Камера высокой четкости * 1
Зарядное устройство * 1
Камера PTZ * 1 комплект
TT Мотор * 2
Sd-карта 16 Гб * 1
Колеса * 2
Модуль дисплея напряжения * 1
Специальный взлетно-посадочной * 1
Застежка-липучка * 1
Винтовые фитинги * 1 упаковка
Кабельные стяжки *




Характеристики
- Бренд
- jongkhurun
- Материал
- Composite Material
- Технические характеристики
- Значение 2
- Колесная база
- Screws
- Габаритные размеры
- Robot Car
- Номер модели
- Robot Car
- Тип транспорта
- Машинки
- Расходный материал для инструментов
- Assembled class
- Периферийные устройства для дистанционного управления
- Robot Car
- Предназначение
- Транспортные средства и Игрушки Дистанционного уПлита
- Детали для тюнинга и запчасти
- Car Shell
- Характеристики
- Assemblage
- Детали дистанционного управления и комплектующие
- Robot Car
Сопутствующие товары






