





Описание


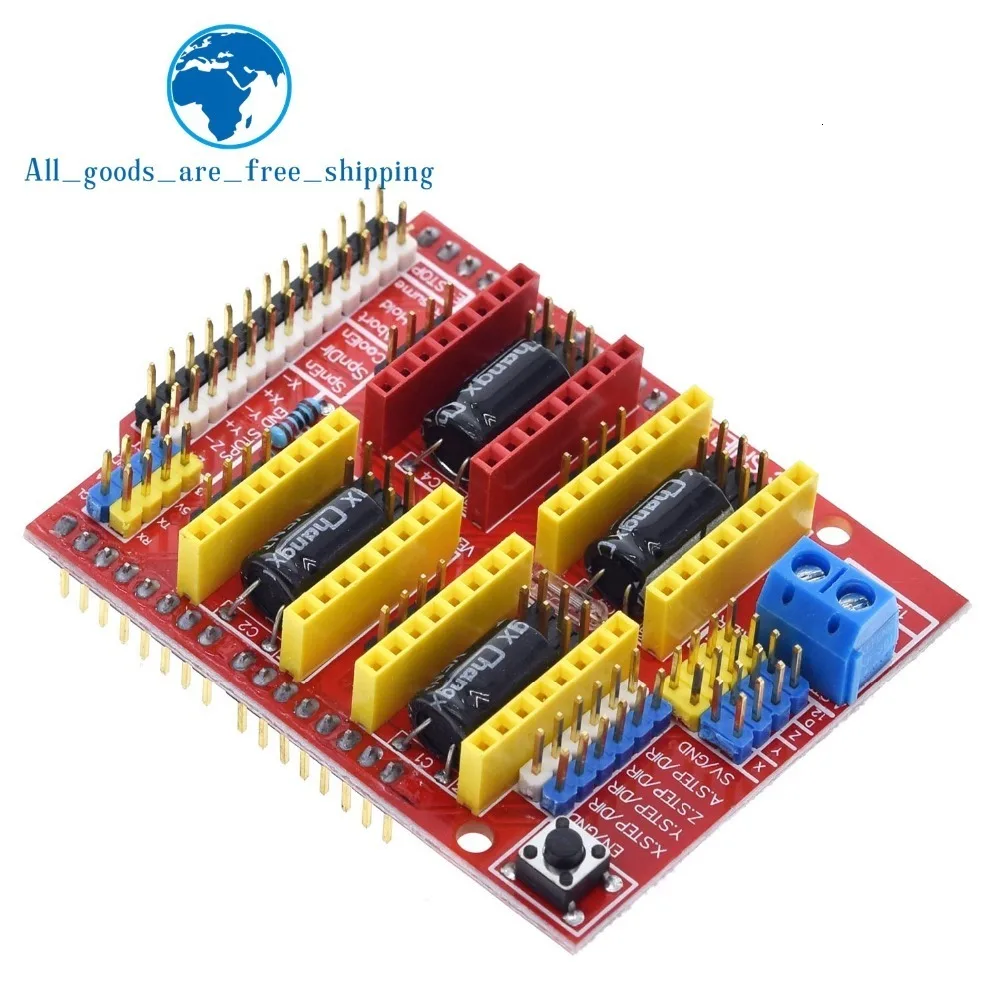
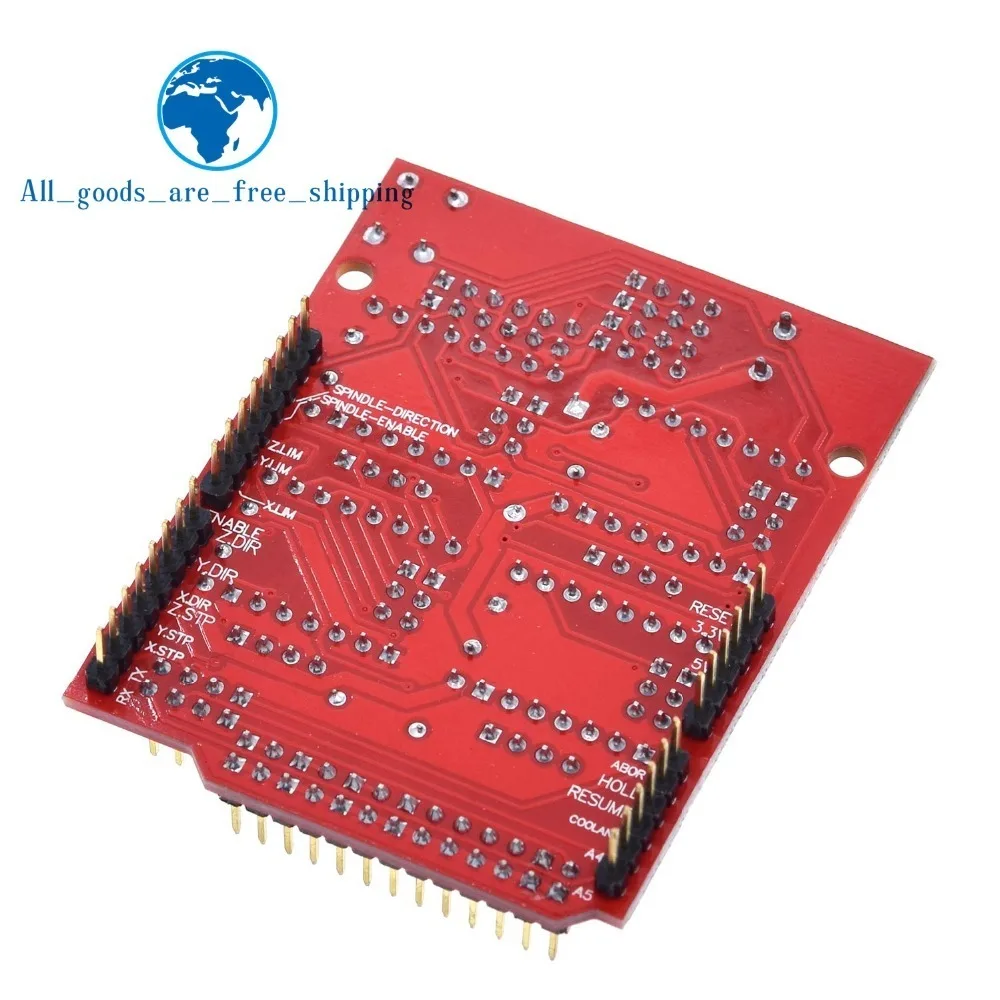
II.UNOИ модульВвода/выводаСоответствие между портом ввода
Основные потребности шагового двигателя управления другие контакты в гравировальной машине, или3DКогда принтер был использован, здесь мы не делаем подробную информацию,Ввода/выводаСоответствует вышеуказанной фигуре.
Плата расширения UNO ----------------------
8 ------------------------ EN (шаговый двигатель включен, активный низкий)
7---------------------- Z. DIR (контроль направления оси Z)
6---------------------- Y. DIR (контроль направления оси Y)
5--------------------- X. DIR (управление направления оси X)
4 --------------------- Z. Шаг (Z-axis stepper control)
3 ---------------------- Y. Шаг (ось Y Шагового управления)
2 --------------------- X. Шаг (X-axis stepper control)
/Вот простые процедуры управления шаговым двигателем,
# Define EN 8/включение шагового двигателя, активный низкий
# Define X_DIR 5/X Ось шагового управления направления двигателя
# Define Y_DIR 6/Управление направления шагового двигателя по оси y
# Define Z_DIR 7/z-axis stepper motor direction control
# Define X_STP 2/шаговый контроль оси x
# Define Y_STP 3/шаговый контроль оси y
# Define Z_STP 4/шаговый контроль оси z
/*
/Функция: ступенчатая Функция: для контроля направления шагового двигателя, количество шагов.
/Параметры: Управление направления dir, dirPin DIR pin, соответствующий шаговому мотору, stepperPin шаг pin, соответствующий шаговому мотору, шаг несколько шагов
/Без возвращаемого значения
*/
Шаг void (булевой dir, byte dirPin, byte stepperPin, int шаги)
{
Цифровая запись (dirPin, dir);
Задержка (50);
Для (int i = 0; i
DigitalWrite (stepperPin, HIGH);
DelayMicroseconds (800);
Цифровая запись (stepperPin, LOW);
DelayMicroseconds (800);
}
}
Void setup () {/шаговый двигатель, используемый в IO pin, настроен на выход
PinMode (X_DIR, выход); pinMode (X_STP, выход);
PinMode (Y_DIR, выход); pinMode (Y_STP, выход);
PinMode (Z_DIR, выход); pinMode (Z_STP, выход);
PinMode (EN, выход);
Цифровая запись (EN, LOW);
}
Void loop () {
Шаг (false, X_DIR, X_STP, 200);/круг разворота двигателя оси X, 200 шагов для круга
Шаг (false, Y_DIR, Y_STP, 200);/разворот двигателя оси y, 200 шагов для круга
Шаг (false, Z_DIR, Z_STP, 200);/круг разворота двигателя оси z, 200 шагов для круга
Задержка (1000);
Шаг (true, X_DIR, X_STP, 200);/ось X мотора переносится lap, 200 шагов для окружности
Шаг (true, Y_DIR, Y_STP, 200);/ось y мотора передан круг, 200 шагов для окружности
Шаг (true, Z_DIR, Z_STP, 200);/ось z мотора передан круг, 200 шагов для окружности
Задержка (1000);
}





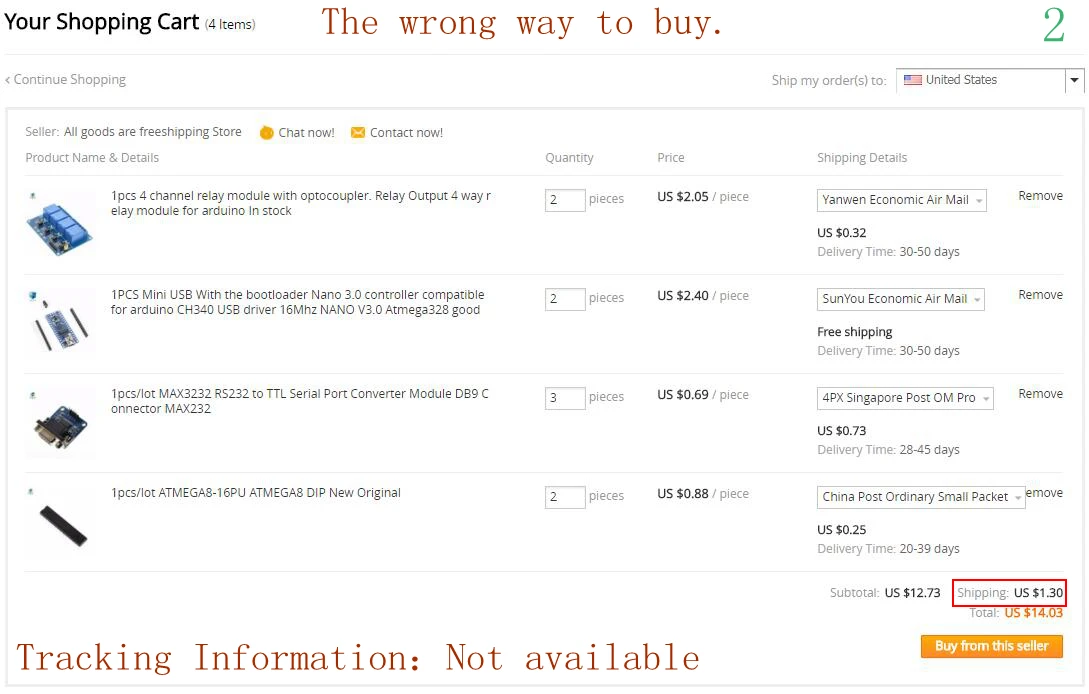
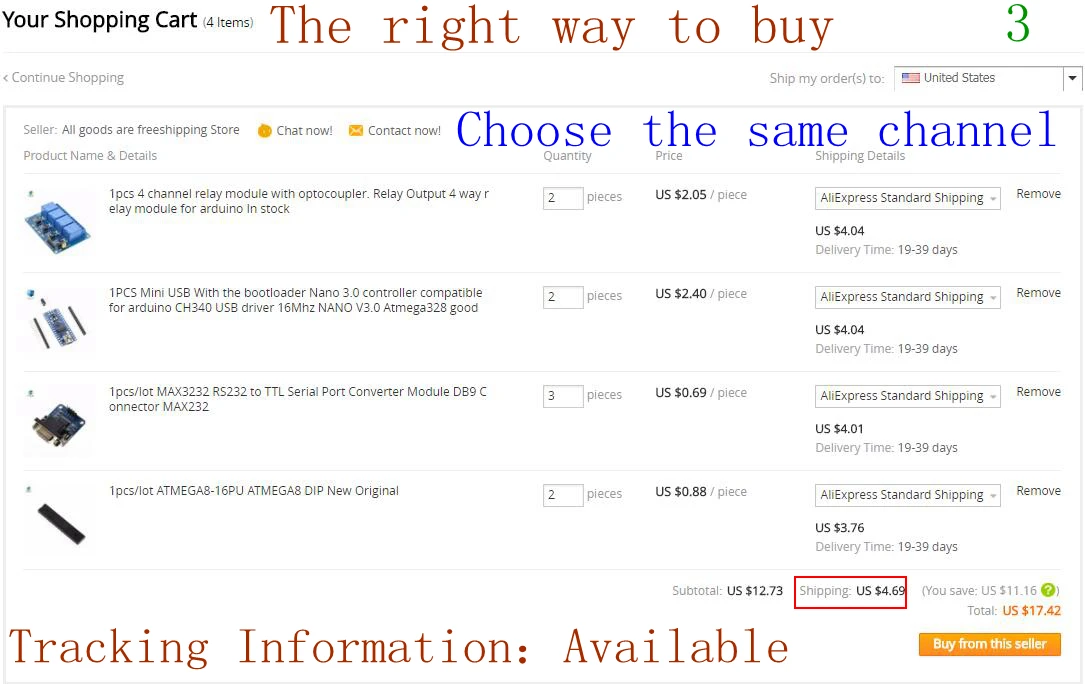
Советы: Выберите тот же канал, и будет платить меньше фрахта.
Характеристики
- Бренд
- TZT
- Состояние
- Новый
- Тип
- Регулятор напряжения
- Упаковка
- DIY KIT
- Индивидуальное изготовление
- Да
- Номер модели
- cnc shield v3
- Применение
- experimental modules
- Рабочая температура
- -40-+85
- For Arduino STM
- electronic module
Сопутствующие товары







