


Описание
Краткая информация
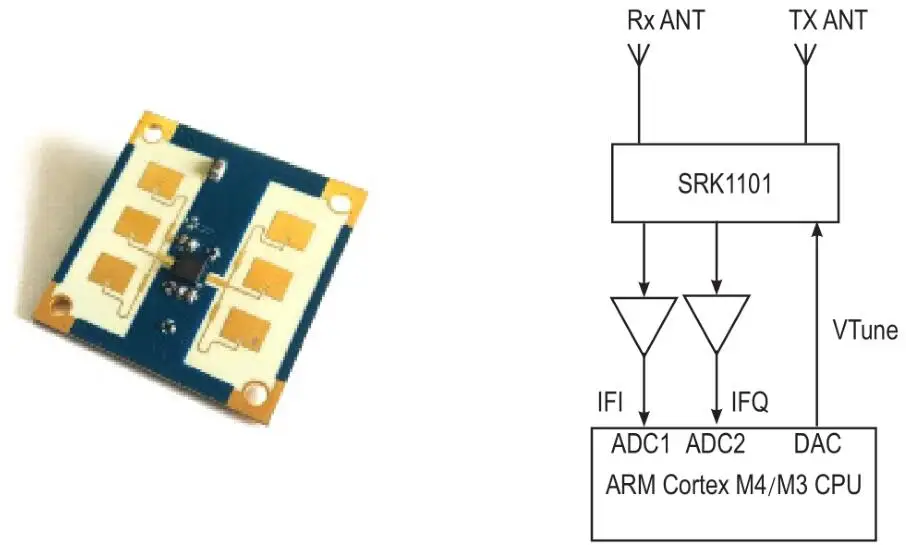
FM-49-это модуль радиолокационного диапазона 24 ГГц, который может измерять динамическое и статическое расстояние цели, скорость, значение последовательного выходного расстояния, значение скорости, амплитуду сигнала.
Характеристика
Диапазон рабочих частот: 24 ~ 24,25 ГГц Дальность обнаружения: человек 0,3 ~ 4 м, автомобиль 0,3 ~ 10 м Погрешность: <5 см Фоновое обучение, функция калибровки Максимальная Эквивалентная Мощность всенаправленного излучения (EIRP): 17 дБм Фазовый шум: 100 дбк/Гц @ 1 МГц Коэффициент приема шума: двусторонний ремень 9 дБ Получить IQ фазовый дисбаланс: <5deg Получить IQ дисбаланс мощности: <1,5 дБ Получение максимального усиления напряжения: 45 дБ 3,3 VОдиночный источник питания, максимальный ток: 70 мА У ARM Cortex M4/M3 серии микропроцессоров Размер: 25*25 мм
Применение
IOTПрименение (туалет ванная комната, распознавание лица, панель, общий парковочный замок, интеллектуальные Чехлы и т. Д.)
Для использования в промышленности (Робот/AGVRanging и избегание препятствий)
Приложение безопасности (вход и выход ворот)
Электрические характеристики

Интерфейс информация
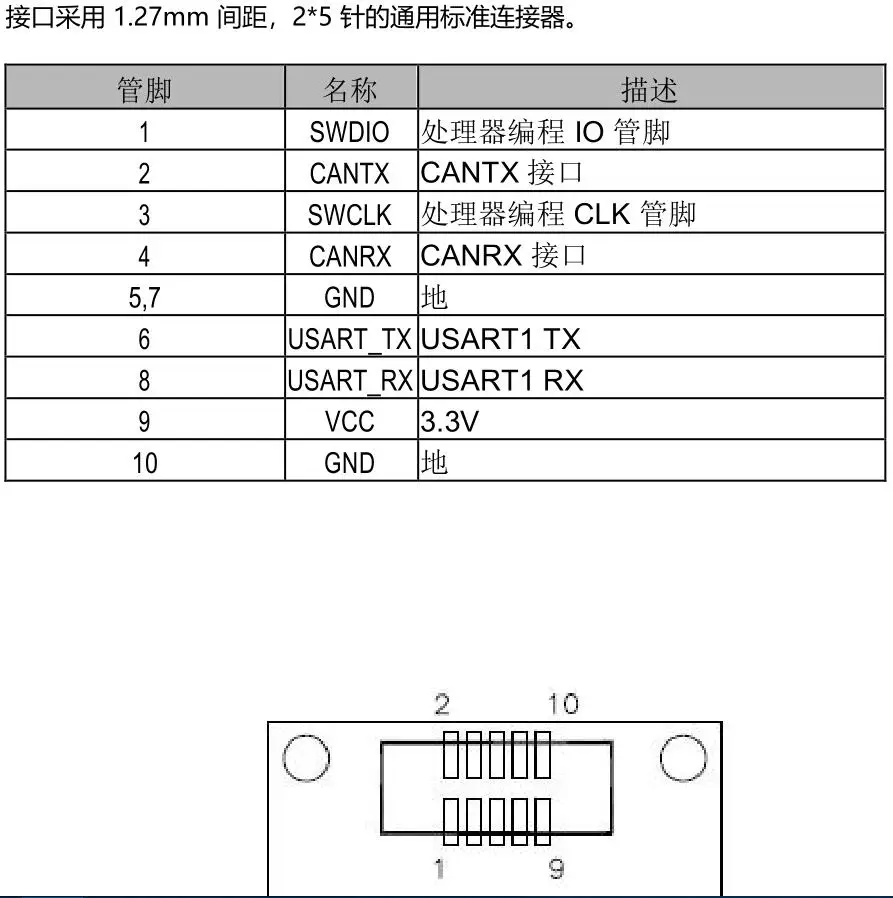
Интерфейс представляет собой стандартный разъем с 1,27 мм интервалом и 2*5 контактов.
Протокол передачи данных
Коммуникационная поддержка USART текстовое соглашение 。
USARTПараметры следующие:
Скорость передачи данных: 115200
Персонаж Ширина: 8bit
Стоп-бит: 1
Четность: 0
1Подключите последовательный порт после включения датчика;
2Пожалуйста, лицо антенны датчика находится перед измерительным пространством, выполнение заказов калибровки: back_sub_start;
3Установка порога обнаружения (на основе фактического тестирования окружающей среды);
4. Чтение данных последовательного порта после обнаружения цели;

Отзывы данных Описание:
rПредставляя расстояние до цели, компания: m;
RsПредставляет величину расстояния, без единицы;
vНоминальная скорость, единицы измерения: км/ч;
VsПредставляет собой величину скорости, без единицы.
Параметрические команды:
Калибровка: back_sub_start
Хранение калибровочных данных: save_back_data
Установка порога расстояния: rs_th = **, цель расстояния будет обнаружена только тогда, когда амплитуда диапазона больше порога расстояния. 。
Установка порога скорости: vs_th = **, цель скорости будет обнаружена только тогда, когда амплитуда скорости больше порога скорости.
Порог приобретения (просмотреть текущий порог): get_all
Для хранения порог: save_vars
Будьте внимательны:
1Пожалуйста, не должно быть металла или другой диэлектрической экранирующей антенны перед датчиком, когда он работает;
2Пожалуйста, калибровка операций должна быть выполнена до начала новой среды;
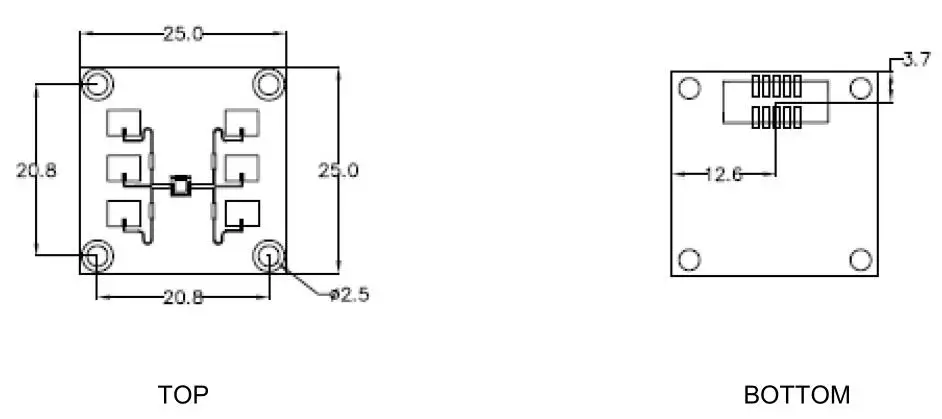
Форма Размер
'
Характеристики
- Материалы для самостоятельного изготовления
- Электрический
Сопутствующие товары









